Plant-Like Robots
Project: MFA Thesis, Art Center College of Design (2014 - 2015)Design Execution: Research, Design, Prototyping, Film Production
Credit: 3D Unity technologists - Jung Won Hong, Nan Tas | Thesis advisors - Elise Co, Ben Hooker | Actor - Nicholas Krall
Award: Winner, SXSW Interactive Innovation Awards 2016
Conference & Exhibition: 3rd Biennale of Research Through Design 2017, National Museum of Scotland, UK
The project explores an alternative view towards human-robot interaction by imagining robots that take on vegetal characteristics. Reinterpreting plants’ interdependent way of living, the project envisions robots that are dispersed through the environment like the seeds of plants. The robots cling to moving objects, animals, and humans by using its tiny barbs and magnetism. Moving along with its vehicle, it senses the environmental data in the surroundings and maps them to its geolocation. These visualized data can be used to map climate data on a micro scale.
Publications
Research Objective
Contrary to the traditional approach to a robot based on an anthropomorphic perspective, the project explores an alternative way to think about robot through the combination of botany and robotics. Using plants’ inanimate characteristics as applicable attributes to a robot, the project tries to redefine a concept, functionality, and interactivity of robot beyond anthropomorphism and anthropocentrism.
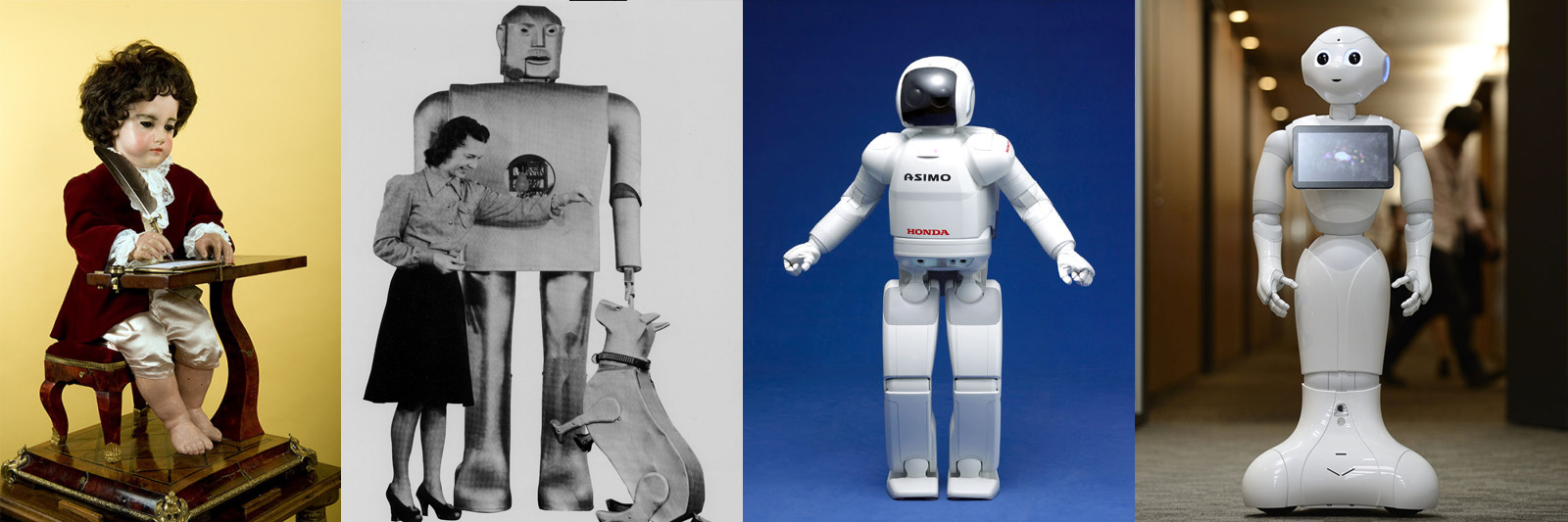
Since mobility has been regarded as robot’s fundamental function, applying vegetal characteristics that are based upon its inanimate lifestyle to a robot may sound absurd. However, plants’ unique behaviors that are passive, slow, and adaptive to its surroundings such as climate and topography, are decent sources of inspiration that could help us reimagine a robot.

The project is an outcome of an attempt to investigate plant intelligence as an interaction mode in human-robot interaction. The robot imagined in the project utilizes its surroundings as a driving source of movement, and its passive and parasitic way of moving helps it travel far distance without consuming battery power. Also, its functional sensitivity enables people to collect and track environmental data in place where is not easily accessible to the public. Questioning about a paradigmatic point of view on robot, the project Plant-like Robots provokes an alternative perspective on a robot and envisions an interdependent relationship between a robot, human, and the environment.
1. Experiments

Photo credit: Left - Wikimedia Commons / Right - Kate St. John
The idea of Plant-like Robots was started under the inspiration of adhesive seed dispersal mechanism of Spanish Needle. The plant has a lot of tiny thorns on its seed and they enable the seed to be brushed and carried by humans and animals. The concept of Plant-like Robots was developed through a series of explorations, and the first step was mimicking Spanish Needle's "Inanimate Mobility" mechanism. The exploration was extended to integrate plant's sensing ability to the mechanism using electronic prototyping tools such as Arduino. The overall experiments aimed to discover a possible type of Plant-like Robots based on reinterpreting plant's behaviors as passive but dynamic way to interact with other species and environment.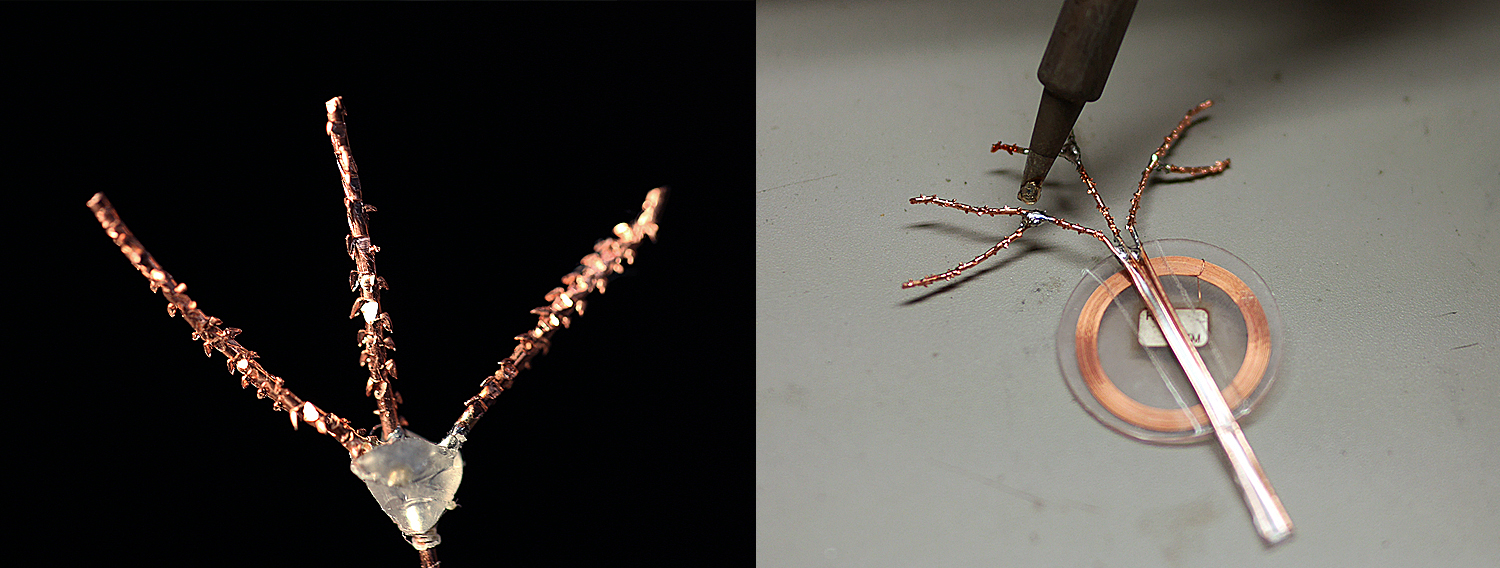
(1) Mimicking the adhesive dispersal mechanism using copper wires and passive RFID chip

(2) Enhancing adhesiveness using barbs and magnets and testing through installation

(3) Exploring dispersal routes by tracking travel distance and time
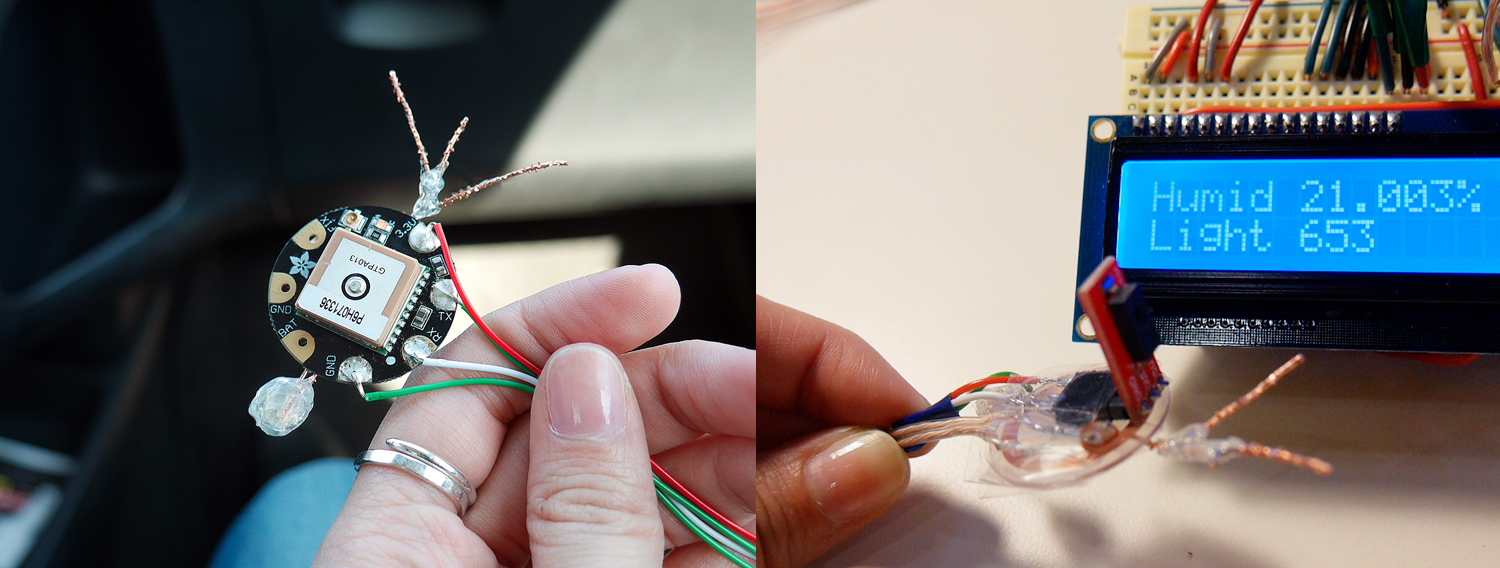
(4) Combining with GPS, light and humidity sensors using Arduino
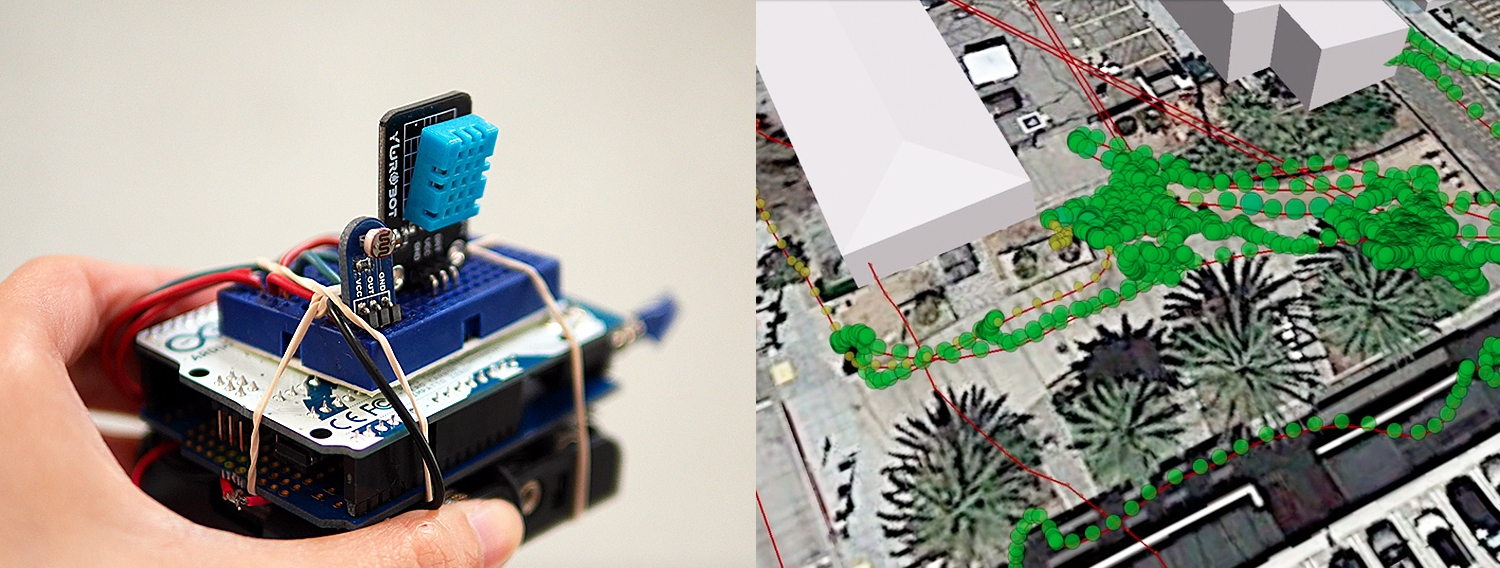
(5) Visualizing the collected KML data on Google Earth
2. Simulation of Dispersal of Plant-Like Robots
The simulation was designed to extend the scale of exploration into an urban scale and examine various factors that would have an influence on the interaction between the plant-like robots, transporters, and spaces. Unity3D was used for building and running the simulation.
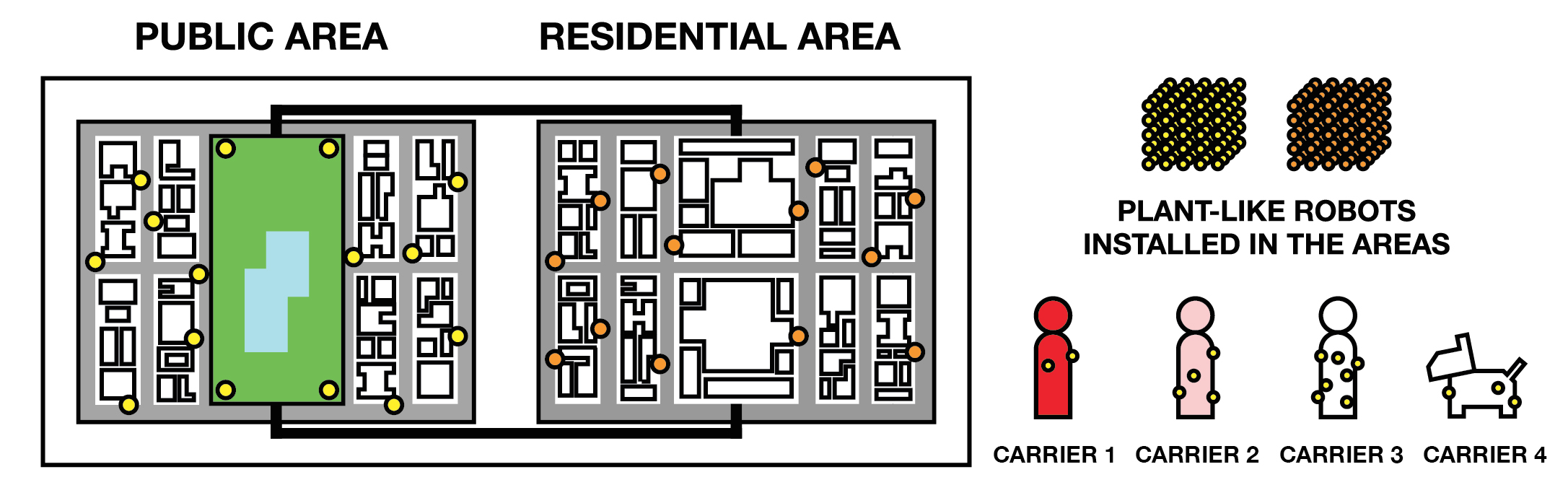
In order to explore multiple dispersal scenarios that could happen in our living environments, a city that consists of public area and residential area is designed as a background of the simulation. The plant-like robots are installed at several sections of the city, and three types of carriers/users that have different levels of favorabilities to the robot are set in the city as potential transporters of the robot.
3. Interview with Dr. Michael Shulman

The film is created to introduce the whole concept and context of the project as a speculative inquiry. Dr. Michael Shulman is a fictional character who is named after Michael Pollan, a writer of the book, The Botany of Desire.
Reference in the film
- Gérôme, Jean Léon. Pygmalion and Galatea. 1890. N.p.
-
Pinocchio. Walt Disney Productions, 1940.
-
Star Wars V: The Empire Strikes Back. Lucas Film Ltd, 2008.
-
Transformers 4: Age of Extinction. Dir. Bay Michael. 2014.
-
Meet Pepper, the Friendly Humanoid Robot. Youtube.com. IEEE Spectrum, 26 Dec. 2014. Web. https://youtu.be/lqlyxg1-gE0.
-
Introducing Spot. Youtube.com. Boston Dynamics, 9 Feb. 2015. Web. https://youtu.be/M8YjvHYbZ9w.
-
The Duel Timo Boll vs. KUKA Robot. Youtube.com. KUKARobotGroup, 10 May 2014. Web. https://youtu.be/tIIJME8-au8.
-
Wings of Life. Dir. Louis Schwartzberg. Disneynature, 2011.
-
What Plants Talk About. PBS Nature, 2013.
-
How Plants Communicate & Think. BBC, 2014.
-
Epigeal Germination Climbing Bean Time Lapse. Youtube.com. Neil Bromhall, 12 Nov. 2010. Web. https://youtu.be/G2RuVxdr0mA.
-
NASA | The Ocean: A Driving Force for Weather and Climate. Youtube.com. NASA Goddard, 3 Aug. 2012. Web. https://youtu.be/6vgvTeuoDWY.